
2018年8月7日に「Pepperアトリエ秋葉原 with SoftBank」にて「第4回オープン設備制御研究会」を開催しました。
今回は設備や機器のエンジニアの方々に集まってもらい、前回のMobotixとKNXやペッパー、HoloLensをつなげて見えたセキュリティシステムの可能性の機器をベースに発展したかたちになりました。
システム概要と接続した機器一覧
ワンフットシーバスの田中さんがシステム図をかいていただきました。

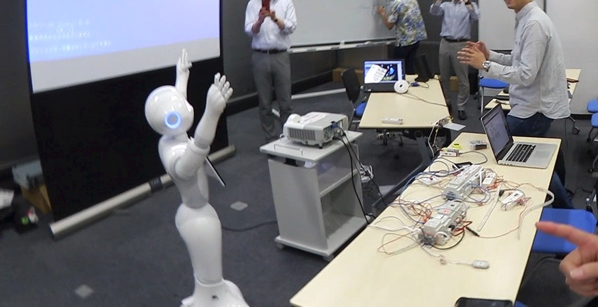
全体的な流れは、Mobotixの監視カメラシステムで不審者を発見すると、接点信号をラズパイが受け取り、そこからNode-REDを使ってKNXゲートウェイからKNXコマンドが電動ブラインドが動き、同時にMQTTメッセージがおくられ、LonWorksを使ってNゲージが、Choregrapheからペッパー4台が、そして、NefryBTを使ってTello2台が動きだすというイメージです。

接続された機器一覧は以下の通り。全体の接続はNode-REDでワンフットシーバスの田中さんが全体のつなぎ込みをしております。
| 機器 | プロトコル | エンジニア |
|---|---|---|
| Mobotix(監視カメラ) | 接点出し | アスティ 久保田さん |
| 電動ブラインド、LED | KNX | 中畑 |
| Nゲージ | LonWorks | 山添さん |
| Peppers(4台) | MQTT | 野良ハック 松下さん、北崎さん、松崎さん |
| Tello (今回は失敗) | MQTT | ワンフットシーバス 田中さん |
↓ 接続した機器紹介の動画はこちら
KNXブラインドアクチュエータをつないでみた
今まではKNXも単なるスイッチアクチュエターをつかってLEDライトをOn/Offぐらいしかしていなかったのですが、日本KNX協会 会長からABB製のブラインドアクチュエータと電動ブラインドをお借りして連携することができました。
やはり、動きのあるものが加わる面白いですね。
会長に感謝です!
結果
Telloについては充電がなくなってしまったので、それ以外で連携し結果は大成功でした。
その動画はこちら。
まとめ
オープン設備制御研究会も4回開催したことで、それぞれ異なる分野の機器や設備の接続の方法について知見が溜まってきました。
で、技術的に接続できることがわかると、今後もとめられるのは【実用性】で、それには【ストーリー】が必要になります。
なので、次回はこの【ストーリー】を考えて設備制御の連携をどのように見せるのか?に力を入れていきます。